|
1、安装nala
echo "deb [arch=amd64,arm64,armhf] http://deb.volian.org/volian/ scar main" | sudo tee /etc/apt/sources.list.d/volian-archive-scar-unstable.list
wget -qO - https://deb.volian.org/volian/scar.key | sudo tee /etc/apt/trusted.gpg.d/volian-archive-scar-unstable.gpg > /dev/null
如果您使用此步骤在 Ubuntu 22.04 及更高版本上安装 Nala,请执行以下命令来安装 Nala:
sudo apt update && sudo apt install nala -y
在旧版本上,要安装 Nala 的旧版本,请执行以下命令:
sudo apt update && sudo apt install nala-legacy -y
2、安装星火商店异常
spark-store
└── Depends:
├── libdtkcore5 (>= 5.4) but it isn't in the cache
├── libdtkgui5 (>= 5.4) but it isn't in the cache
└── libdtkwidget5 (>= 5.4) but it isn't in the cache
cd /tmp
# 可到 https://www.spark-app.store/download 找到
wget https://zunyun01.store.deepinos.org.cn/spark-store-dependencies-kylin.zip
unzip spark-store-dependencies-kylin.zip
# 解压得到目录 spark-store-dependencies-kylin/
# 以及 spark-store-dependencies-kylin/解压我.tar
cd spark-store-dependencies-kylin/
tar xvf 解压我.tar
# 得到 all-depends/
# 以及 all-depends/Debian10-or-ubuntu-20.04/
cd all-depends/Debian10-or-ubuntu-20.04/
sudo apt update
sudo apt install -yf ./*.deb
3、ubuntu 暂时不能解析域名“packages.microsoft.com”
sudo vim /etc/resolv.conf
添加和修改
nameserver 8.8.8.8
nameserver 8.8.4.4
nameserver 127.0.0.1
4、安装ROS
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt install curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
sudo apt update
sudo apt install ros-noetic-desktop-full
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
roscore
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
sudo rosdep init #roscore窗口不关
如果因为网络无法下载报错,执行下面三个指令,修改地址为国内地址,执行后,在执行init
sudo nala install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdep
rosdep update
roscore #运行ros
sudo nala install ros-noetic-rqt-robot-steering
rosrun rqt_robot_steering rqt_robot_steering #运行rqt_robot_steering
sudo nala install ros-noetic-turtlesim
rosrun turtlesim turtlesim_node
编译github项目
新建目录 主文件夹---catkin_ws---src
git clone https://github.com/6-robot/wpr_simulation.git
安装依赖,在work/catkin_ws/src/wpr_simulation/scripts下执行
sudo ./install_for_noetic.sh
回到catkin_ws目录,编译
加载工作的软件包
source ~/work/catkin_ws/devel/setup.bash
运行编译好的ROS程序
roslaunch wpr_simulation wpb_simple.launch
添加打开终端程序时添加环境
gedit ~/.bashrc
打开文件后,末尾添加
source ~/work/catkin_ws/devel/setup.bash
下载仿真小乌龟源码,ros商店搜索turtlesim,在src目录下clone
git clone https://github.com/ros/ros_tutorials.git
5、安装Terminator
sudo nala install terminator
6、安装vscode
中文插件 ros cmake tools bracket
7、双系统调整系统启动优先级
在ubuntu中执行
sudo gedit /etc/default/grub
"GRUB_DEFAULT=0" 为 "GRUB_DEFAULT=2" (意思是将 0 改为windows系统的编号,修改完毕后保存文件关闭编辑器)
sudo update-grub
重启电脑
8、打开网卡设置
9、安装QT
使用命令安装,不是最新,不能指定版本
sudo apt-get install qtcreator qt5-qmake qtbase5-dev-tools qtbase5-dev libqt5serialbus5-dev libqt5serialport5-dev qtvirtualkeyboard-plugin
指定版本,使用源码编译命令
1、下载源码
查看 Qt 的最新版本 https://download.qt.io/archive/qt/
# 下载源码和源码的 md5 校验码
wget https://download.qt.io/archive/qt/5.15/5.15.11/single/qt-everywhere-opensource-src-5.15.11.tar.xz
wget https://download.qt.io/archive/qt/5.15/5.15.11/single/md5sums.txt
# 校验
md5sum qt-everywhere-opensource-src-5.15.11.tar.xz
# output: 37b79a3764b0c9157fa3686df209b25a qt-everywhere-opensource-src-5.15.11.tar.xz
# 解压并进入目录
tar -xvf qt-everywhere-opensource-src-5.15.11.tar.xz
cd qt-everywhere-src-5.15.11/
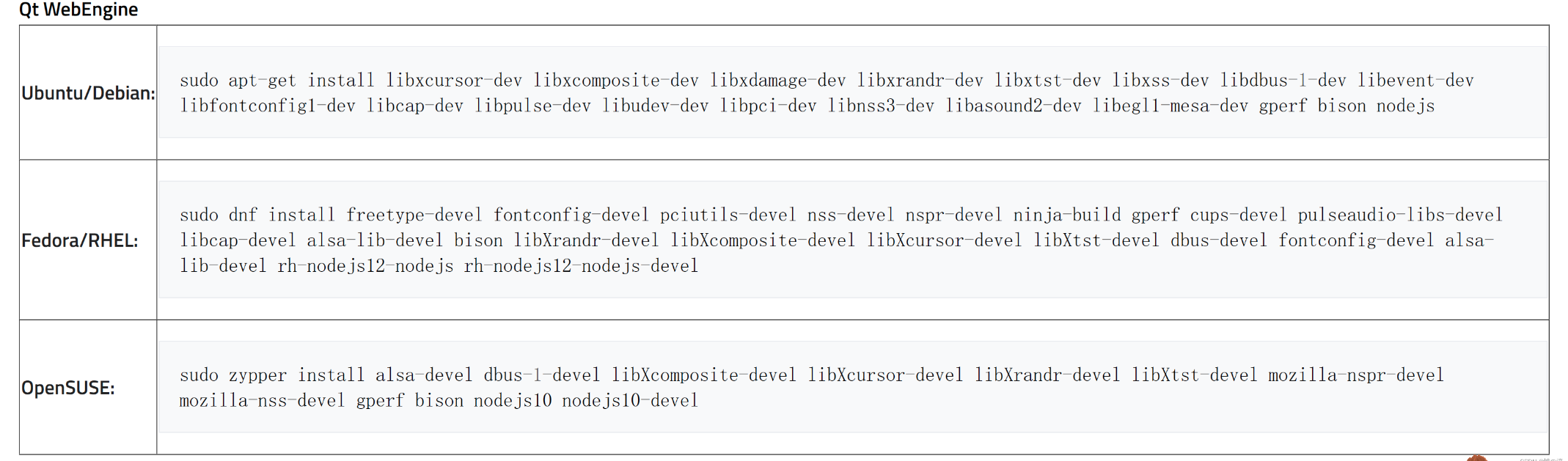
2、安装依赖
sudo apt install libxcursor-dev libxcomposite-dev libxdamage-dev libxrandr-dev libxtst-dev libxss-dev libdbus-1-dev libevent-dev libfontconfig1-dev libcap-dev libpulse-dev libudev-dev libpci-dev libnss3-dev libasound2-dev libegl1-mesa-dev gperf bison nodejs
3、编译
./configure
# 键入 o 选择 open source 编译
# 键入 y 选择接受 license
sudo make -j8
sudo make install
4、qtchooser
sudo apt install qtchooser
# 其中 qt5.15.11 是我们给版本的命名, 后面的地址根据安装位置确定 (更换版本同理)
qtchooser -install qt5.15.11 /usr/local/Qt-5.15.11/bin/qmake
# 设置环境变量, 启用 qt5.15.11, 这个要与我们的命名保持一致
sudo vim /etc/profile
# 最后补充
export QT_SELECT=qt5.15.11
#此外,建议不要直接将 /usr/local/Qt-5.15.11/bin/qmake 软连接到 /usr/bin 下,该操作导致只有 qmake 指令被正确链接,其他 /usr/local/Qt-5.15.11/bin 下的指令会出现版本冲突或软链接为空的错误。我们应该正确使用 qtchooser 来管理 Qt 版本。
qmake -version
# QMake version 3.1
# Using Qt version 5.15.11 in /usr/local/Qt-5.15.11/lib
依赖
安装 Qt Designer 和 Qt Assistant
/usr/local/Qt-5.15.11/bin/designer
sudo make docs
sudo make install_docs
/usr/local/Qt-5.5.11/bin/assistan
https://download.qt.io/archive/online_installers/
10、finalShell
该版本功能和windows版基本一样,但是主机检测和远程桌面功能由于兼容性问题暂时无法使用,以后会支持.
(注意,FinalShell已经不再支持32位系统)
一键安装脚本
rm -f finalshell_install_linux.sh ;wget www.hostbuf.com/downloads/finalshell_install_linux.sh;chmod +x finalshell_install_linux.sh;./finalshell_install_linux.sh;
安装路径
/usr/lib/finalshell/
配置文件路径
/home/$USER/.finalshell/
卸载
删除安装目录 /usr/lib/FinalShell/
11、安全重启
安全重启命令
ubuntu系统尽量不要直接强制关机,然后再开机。这样可能会有开不了机的风险,ubuntu有自己的安全重启命令。
同时按住Ctrl和Alt,过程中一直按住不要松,按一下SysRq(有的电脑是PrtSc,我的电脑就是),然后依次按下R、E、I、S、U、B
12、连接其他系统的smb
1.1 安装samba客户端
sudo apt-get install smbclient -y
1.2 查看文件共享权限
smbclient -L //192.168.100.6
1.3 建立挂载点
mkdir -p /mnt/Myshare
1.4 临时挂载
sudo mount -t cifs -o user=<username>,password=<password> //192.168.100.6/Software /mnt/Myshare/
1.5 开机自动挂载
//192.168.100.6/Software /mnt/Myshare cifs user=<username>,password=<password> 0 0
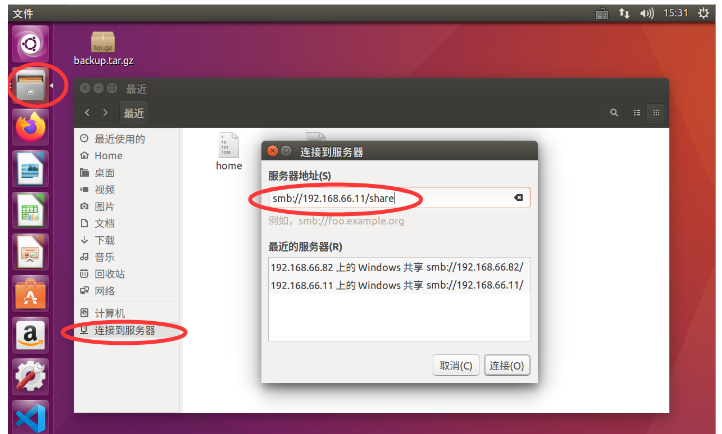
一. 从Ubuntu Desktop访问Windows下samba共享文件夹
1. 安装samba
windows的共享文件夹貌似是用的 SMB 协议,所以先给ubuntu装上SMB:
apt-get install smb
apt-get install smbclient
2. 修改配置
装好之后,据说ubuntu默认的协议比较旧,连不上,所以改一下配置:
sudo gedit /etc/samba/smb.conf
找个空白的地方加上:
client min protocol = CORE
client max protocol = SMB3
我是在[global]下面加的
然后重启samba服务:
service smbd restart
3. 连接
用命令行也可以:
sudo mount -t cifs -o username=Guest //192.168.66.82/share /mnt/share
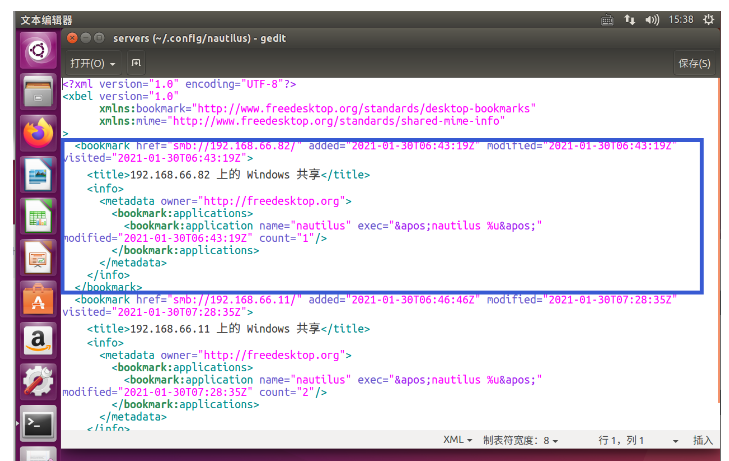
4. 删除“最近的服务器”
删掉整个<bookmark>标签:
gedit ~/.config/nautilus/servers
原文地址:ubuntu16.04通过网络访问windows共享文件夹(samba) (taodudu.cc)
13:安装打开sqlite工具
# 安装 sqlitebrowser
$ sudo apt-get install sqlitebrowser
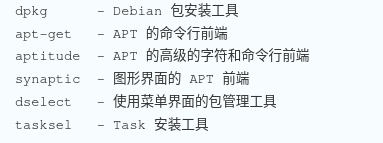
包管理工具
14、有未能满足的依赖关系。请尝试不指明软件包的名字来运行“apt --fix-broken install”(也可以指定一个解决办法)“的问题解决
15、curl: command not found解决方法
apt-get update -y && apt-get install curl -y
16、安装Microsoft Edge浏览器Dev版(每周更新)
## Setup
curl https://packages.microsoft.com/keys/microsoft.asc | gpg --dearmor > microsoft.gpg
sudo install -o root -g root -m 644 microsoft.gpg /etc/apt/trusted.gpg.d/
sudo sh -c 'echo "deb [arch=amd64] https://packages.microsoft.com/repos/edge stable main" > /etc/apt/sources.list.d/microsoft-edge-dev.list'
sudo rm microsoft.gpg
## Install
sudo apt update
sudo apt install microsoft-edge-dev
17、安装cloudflare-no
# Add cloudflare gpg key
curl -fsSL https://pkg.cloudflareclient.com/pubkey.gpg | sudo gpg --yes --dearmor --output /usr/share/keyrings/cloudflare-warp-archive-keyring.gpg
# Add this repo to your apt repositories
echo "deb [arch=amd64 signed-by=/usr/share/keyrings/cloudflare-warp-archive-keyring.gpg] https://pkg.cloudflareclient.com/ $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/cloudflare-client.list
# Install
sudo apt-get update && sudo apt-get install cloudflare-warp
18、查找已安装的软件
apt list --installed | grep xxxxxxx
19、卸载软件
20、查看Mac的网卡型号
lspci | less # 搜索network controller
lspci -vnn | grep -i net
# 结果例如:Network controller: Broadcom Inc. and subsidiaries BCM4360 802.11ac Wireless Network Adapter (rev 03)
21、安装vim
sudo apt update
sudo apt install vim
22、Macbook air 安装wifi驱动-no
sudo apt-get update
sudo apt-get install linux-headers-generic build-essential
下载文件:https://packages.debian.org/bullseye/all/firmware-b43-installer/download
安装firmware-b43-installer_019-7_all.deb
查看
10、依赖关系问题使得 firmware-b43-installer 的配置工作不能继续:firmware-b43-installer 依赖于 b43-fwcutter (>= 1:019-7);然而:未安装软件包 b43-fwcutter。
23、查看ip地址
24、ifconfig: 未找到命令
whereis ifconfig
#输出:ifconfig: /usr/sbin/ifconfig /usr/share/man/man8/ifconfig.8.gz
alias ifconfig='/sbin/ifconfig'
25、 E: 无法定位软件包 net-tool
sudo apt-get update
sudo apt install net-tools
26、N: 忽略‘micr’(于目录‘/etc/apt/sources.list.d/’),鉴于它没有文件扩展名
sudo rm /etc/apt/sources.list.d/********
27、安装向日葵 for Linux-no
sudo dpkg -i sunloginclientshell-10.1.1.28779-amd64.deb
dpkg: 依赖关系问题使得 sunloginclient 的配置工作不能继续:
sunloginclient 依赖于 libncurses5;然而:
未安装软件包 libncurses5。
28、geidt: 未找到命令
sudo apt-get install gedit
29、安装qt开发环境-no
sudo apt-get install build-essential
sudo apt-get install qtbase5-dev qtchooser qt5-qmake qtbase5-dev-tools
sudo apt-get install qtcreator
sudo apt-get install qt5*
30、系统备份
- dump:dump 和 restore 命令用于 ext2/ext3/ext4 文件系统;
- xfsdump:xfsdump 和 xfsrestore 命令用于 XFS 文件系统;
- backupninja:轻量的可扩展的 meta-backup 备份系统;
- bacula-common/bacula-client/bacula-console/bacula-server:网络数据备份;
- amanda-common/amanda-client/amanda-server:高级自动化网络归档器;
- backup-manager:Linux 命令行系统备份工具;
- backup2l:用于可挂载媒介的低维护的备份/恢复工具;
- backuppc:BackupPC 是用于系统备份的高性能的企业级工具;
- duplicity/flexbackup/rdiff-backup/restic/slbackup:远程增量备份。
31、使用sudo直接输入密码后作为以su作为root用户身份登陆并输入
su
root密码
nano /etc/sudoers
#root ALL=(ALL:ALL) ALL 在这行下添加这行
lk ALL=(ALL:ALL) ALL
exit
32、nala替换apt,更快的下载速度和颜色编码文本
sudo apt install nala
#sudo nala install cargo #Rust 包管理器 Cargo 入门
33、作系统快照
sudo nala install timeshift
34、隔离环境中运行应用程序
sudo nala install flatpak
flatpak remote-add --if-not-exists flathub https://dl.flathub.org/repo/flathub.flatpakrepo
flatpak --version
flatpak install xxx
35、网络安全工具
sudo nala install ufw
sudo ufw status
sudo systemctl start ufw
sudo ufw deny 22/tcp #禁用22端口
36、安装KDE的方法 -no
sudo apt install kde-plasma-desktop——最小安装:仅安装桌面环境以及基础软件
sudo apt install kde-standard ——标准安装:桌面环境以及常用软件
选择下一个选项
----切换桌面环境指令
switchdesk kde
switchdesk gnome
37、挂载smb-no
sudo apt-get install cifs-utils
sudo nala install smbclient
38、设置软件源
sudo nala fetch
sudo nala update
sudo nala upgrade
39、安装软件时选择包
sudo nala install obs-部分软件名
tab健
40、nala安装本地deb包
sudo nala install ./xxxx.deb
41、查看系统信息
sudo nala install neofetch
neofetch
42、下载星火应用商店
在https://gitee.com/spark-store-project/spark-store/releases/tag/4.2.9下载
sudo nala install ./spark-store_4.2.9_amd64.deb
43、如何在 Debian 12 上安装 Xfce 桌面 -no
sudo nala update && sudo nala upgrade
sudo nala install task-xfce-desktop
reboot
nala --fix-broken install
44、安装ROS
ROS报错
文件 list 第 1 行的记录格式有误 /etc/apt/sources.list.d/ros2.list (Component)
sudo rm /etc/apt/sources.list.d/ros-latest.list
45:查找运行的程序
netstat -anp
ps -ef | grep "car"
在 ps 命令中,选项 -e 的全写是 --everyone 或 --all
f:使用全格式(full-format)显示进程信息
#kill 965 结束指定pid的程序
46:下载工具
https://motrix.app/download
47:解压zip文件
48、创建文本文件
49、备份配置和软件
备份系统设置和安装的软件。你可以使用APTonCD来完成这项任务。APTonCD是一个开源软件,它可以帮助你将所有已安装的软件打包成ISO镜像文件。
安装APTonCD:
sudoapt-getupdate
sudoapt-getinstallaptoncd
或者
创建自己镜像文件
https://www.bilibili.com/video/BV1ve411N7fh/?spm_id_from=333.337.search-card.all.click&vd_source=39511464eef7931ce0016991472a0829
50、arm ubuntu 安装docker
1、卸载可能存在的旧版本
sudo apt remove docker docker-engine docker-ce docker.io
2、安装依赖包
sudo apt update && apt install -y apt-transport-https ca-certificates curl software-properties-common
3、添加Docker密钥
推荐使用阿里云源
3.1、阿里云
curl -fsSL http://mirrors.aliyun.com/docker-ce/linux/ubuntu/gpg | sudo apt-key add -
4、添加Docker源
4.1、阿里云
sudo add-apt-repository "deb [arch=arm64] https://mirrors.aliyun.com/docker-ce/linux/ubuntu $(lsb_release -cs) stable"
5、安装Docker
sudo apt update && apt install -y docker-ce
7、查看Docker是否安装成功
docker -v
51、ubuntu下nginx的命令
service nginx start
service nginx restart
service nginx stop
sudo nginx -t 检查配置文件是否正确
sudo nginx 默认启动nginx
配置文件
/etc/nginx/nginx.conf
52、查看cpu的核心数
grep process /proc/cpuinfo | wc -l
来源:https://www.cnblogs.com/hongmaju/p/17909754.html |


 發表於 2023-12-17 20:46:00
發表於 2023-12-17 20:46:00